Select or drop a image or 3D model here to search.
We support JPG, JPEG, PNG, GIF, WEBP, GLB, OBJ, STL, FBX. More formats will be added in the future.
Asset Overview
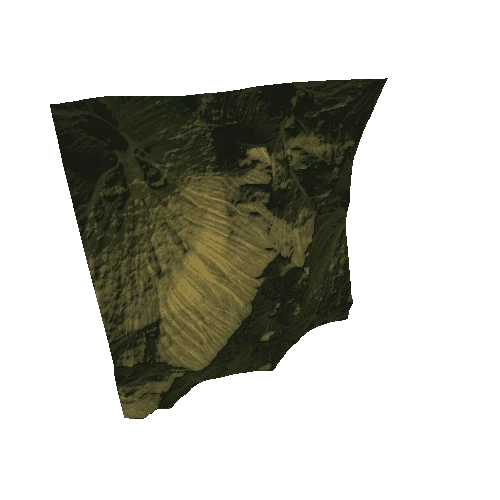
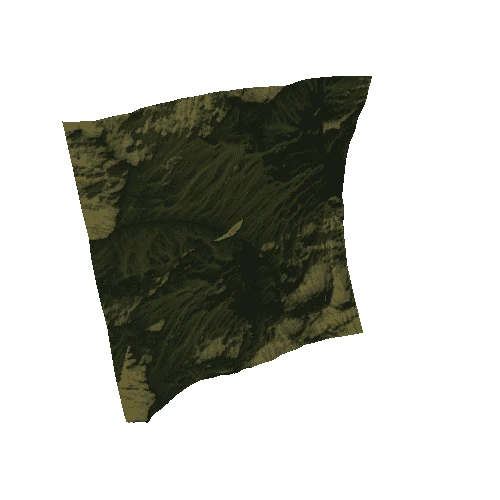
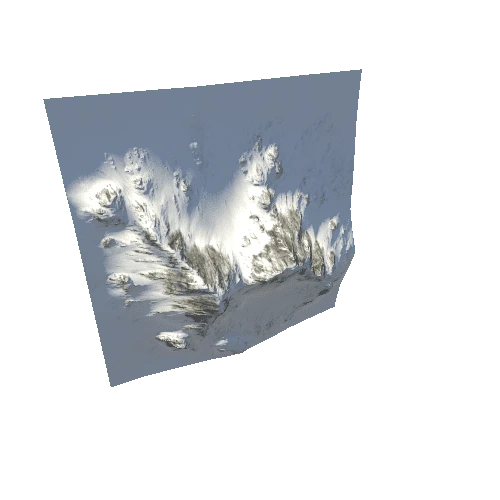
This model represents the results of a second pass using Regard3d on a series of photographs taken from a balloon. Photos courtesy Steven Ellis.
Image matching: Keypoint ratio and Keypoint matching sensitivity were set to 'ultra'.
Triangulation: Global (L2 rotation averaging, SoftL1 translation averaging), intrinsic camera parameters refined
Densification: UseVis: yes Level: 1 Cell size: 2 Threshold: 0.7 wsize: 7 Min image num: 3 Max cluster size: 100
Surface: Poisson reconstruction, Depth: 9 Samples per Node: 2.9 Point weight: 4 Trim threshold: 5, GeomVisTest: yes Global seam level: yes Local seam level: yes Outlier removal: Gauss clamping









/Screenshots/Grass_ (42)_20.png)